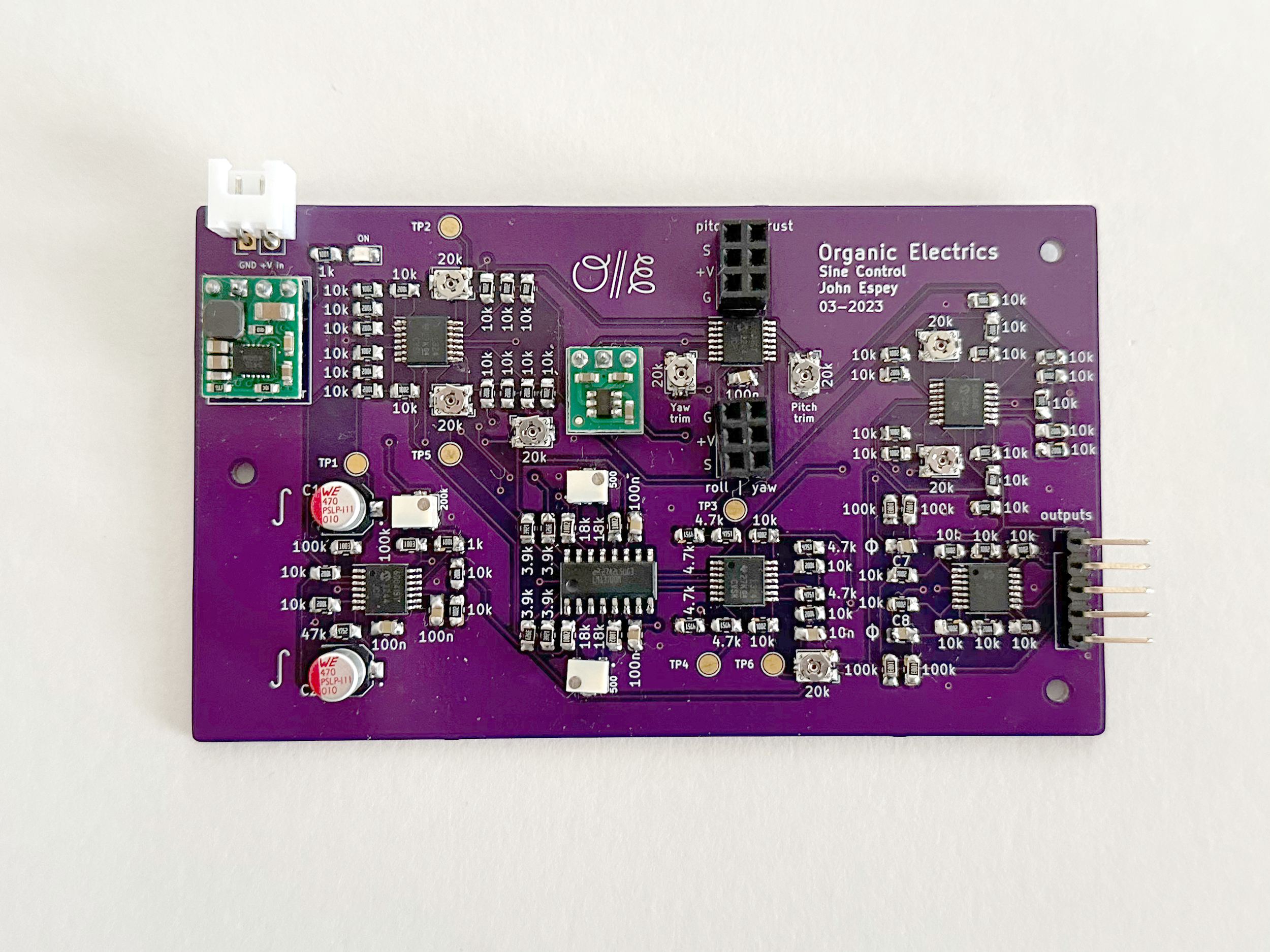
Analog servo driver and analog proportional and integral control board. I built six each so I can use these as modular building blocks in my prototypes.
Keeping with my dedication to analog circuitry, I have decided to experiment with analog PID control introduced into the signal flow of my flapping mechanism. I developed an analog proportional and integral (P.I.) control circuit and designed new PCBs in a modular form. With these in hand, I will update my prototype wing mechanism and add these circuits to observe their behavior.
Each servo has an internal feedback potentiometer which I can tap off of to read that same analog voltage. Using some buffering and amplification, I can compare that voltage to the desired state and process the error. This is the first stage of any PID control. I then use a single integrator op-amp with some amplification to do a combined P.I. control stage. I experimented with the derivative “D” stage of PID, but I didn’t feel this stage added value or behavior to the circuit I liked. Because each servo already has its own feedback control system, I think this additional P.I. control is working in tandem with the built in control of the servo.

Sine control board, four servo generator boards, and four PI control boards. All PCBs from OSH Park.
My Sine Control board was originally designed to inject sine wave signals into my RCTx device. This did work, but my prototypes still depend on a large power supply and need to be clamped down, so I don’t need wireless control yet. Also, I had an analog servo driver circuit in my back pocket from a great YouTube tutorial from w2aew. I decided I would prefer to use additional analog circuits to drive my servos which could take any input voltage signal. I adapted the servo circuit from w2aew’s video and created a PCB of it for use in my projects. I added more convenient servo power input pins, accepting the fact that I always need to provide a separate power supply to the servos. Servo motors can pull a lot of current and temporarily drop the power supply voltage. Also, some high power and high speed servos are capable of operating at seven or eight volts, and I would like to continue using the MCP600x op-amps, which max out at five and a half volts or so. With one servo driver per board, I ordered six from OSH Park and I’ll be able to use these for many prototypes in the future.
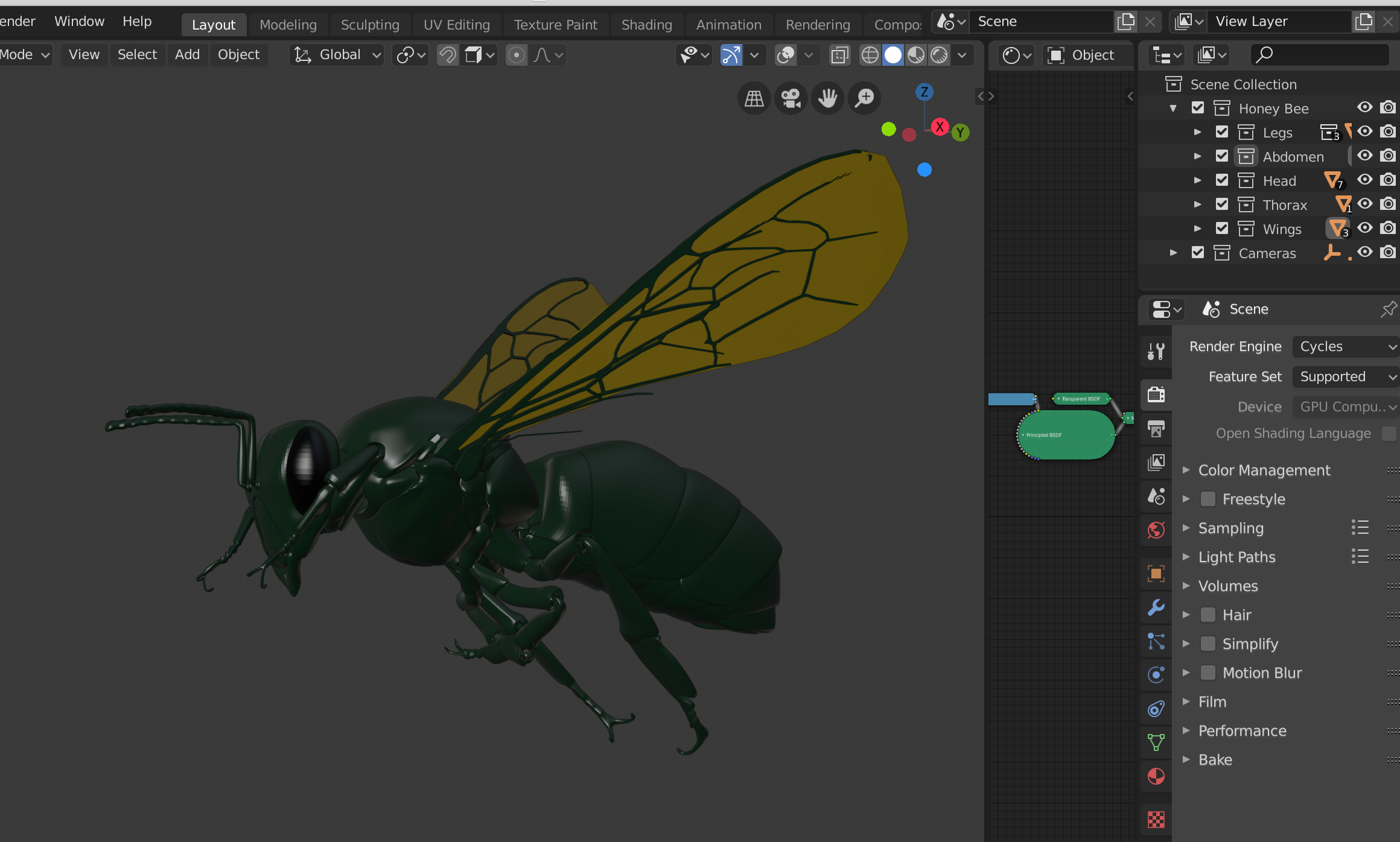
Now with analog sine signal generator, analog P.I. control, and analog servo generator, I have modular building blocks to use for prototyping more robotic mechanisms and giving them behavior. The P.I. control boards add a spring like quality to the movement of the servo, and it responds to being pushed out of position. I like this semi reflex type behavior a lot. I need to update my four wing mechanism and 3D print it. I wish to include small mounting brackets for these new PCBs too. The Sine Control PCB will stay on the desk though because it needs bulky input controls from joysticks and linear faders. I hope the new flapping behavior is more fluid and organic. If so, I will consider creating a more finalized piece by developing semi autonomous input controls and putting all of it into a single enclosure on the insectoid. Perhaps it could be a mobile or some kind of kite?